近期🫦,我校章偉教授指導的意昂2021屆碩士研究生顏晨航在國際著名期刊《IEEE Transactions on Cybernetics》52卷第9期上,發表題為“Adaptive Bipartite Time-Varying Output Formation Control for Multiagent Systems on Signed Directed Graphs”的最新研究成果。該期刊由美國電氣與電子工程師學會(IEEE)主辦,系中科院SCI分區工程技術大類和計算機科學大類一區Top期刊🚴,最新的影響因子為19.118🅱️。
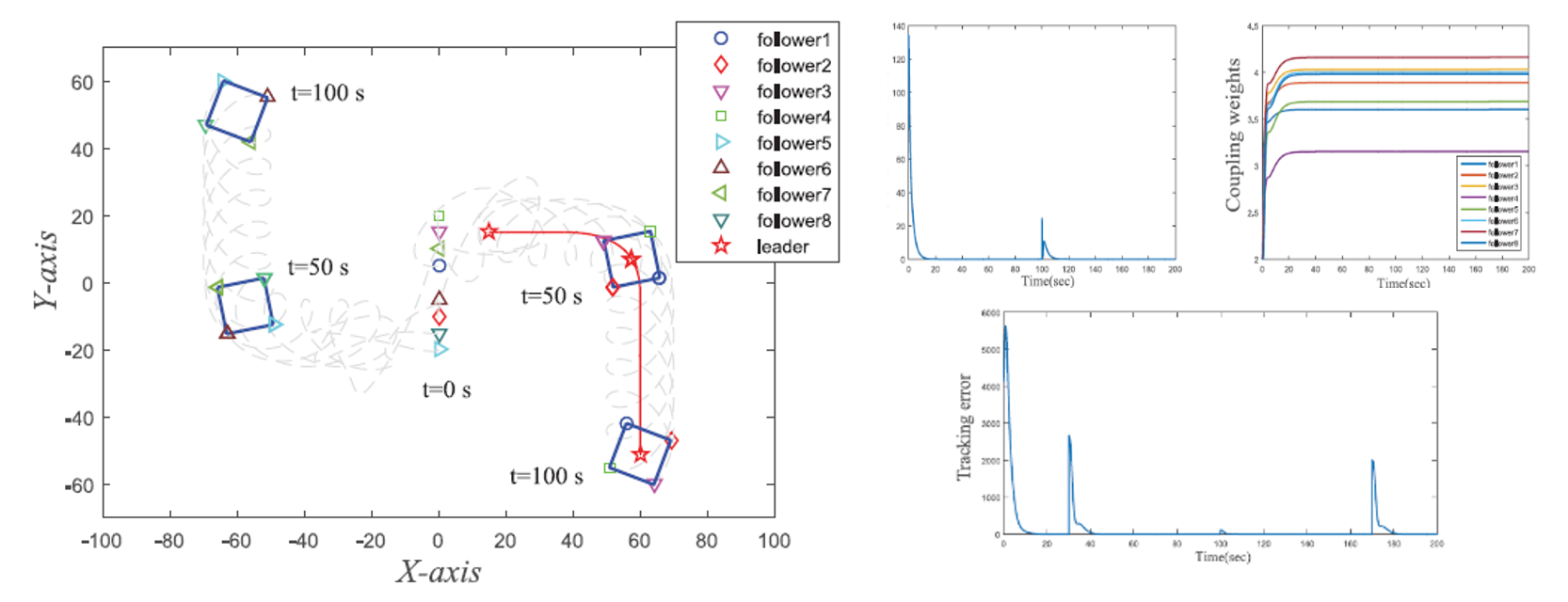
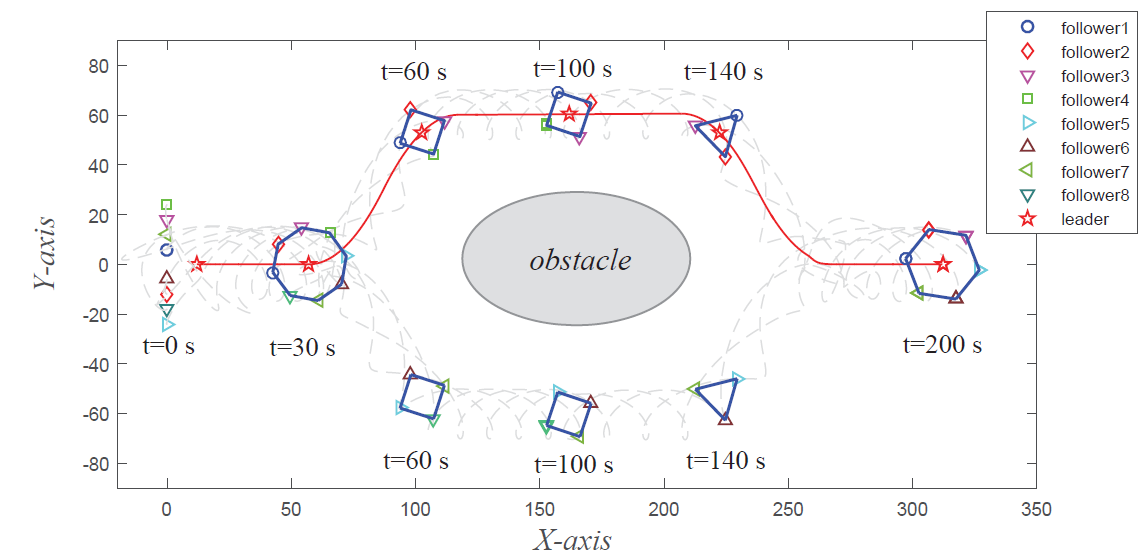
近些年來隨著多無人機、多無人車等協同控製技術在軍事和民用中發揮著越來越重要的作用,集群智能控製技術得到了飛速的發展,其中分布式多智能體編隊控製技術是當前的一個研究熱點🧡。該文提出了一種新型的分布式狀態觀測器設計方案👨🏼🚒,使得多個智能個體在未知領導者輸入的情況下實現一種具有對抗關系的編隊隊形。這一種編隊隊形包含兩個位置時刻改變的子編隊🧖🏽♀️👩🏽🎨,且它們的編隊幾何中心具有對稱關系。該控製算法僅利用智能體間的輸出反饋信息,避免了通信網絡圖拉普拉斯矩陣的特征值的使用,從而可以實現分布式編隊控製🧛🏼♀️。在仿真部分,通過使用多無人車編隊的實例展示了該分布式算法的可靠性🚲⚪️。該項研究得到國家自然科學基金項目(61991412,61803256🕸,62003207,61873318)的資助👈,合作者為華中科技大學蘇厚勝教授和意昂平台李曉航副教授。
據悉,第一作者顏晨航在碩士期間共發表SCI論文 6篇,EI論文2篇,榮獲優秀畢業研究生榮譽,現在北京理工大學攻讀控製理論與控製工程專業博士學位。近年來,章偉教授科研團隊與合作者在多智能體協同控製、編隊控製、非線性狀態估計等領域取得一些研究進展,已在《IEEE Transactions on Cybernetics》(一區,IF=19.118)《IEEE Transactions on Systems, Man, and Cybernetics: Systems》(一區♤,IF=11.471)《IEEE Transactions on Circuits and Systems-II: Express Briefs》(二區😣,IF=3.691)等國際期刊上發表SCI論文60余篇。
